Human SLAM
Indoor Localisation of Devices and Users
IEEE International Conference on Internet-of-Things Design and Implementation
Berlin, 2016
Wouter Bulten
Artificial Intelligence Department
Radboud University, Netherlands
In collaboration with:
Anne van Rossum (DoBots & Almende)
& Pim Haselager (Donders Institute)
Supported by the Proheal project (n. 12007)
funded by Information Technology for European Advancement (ITEA2)
In a smart home / hospital / office, how do we act when..
We do not know where users are?
Location is key in smart spaces
What can we do without locations of devices?
Relative position vs absolute
We need both the user and the system
But, we can benefit from this combination
Problem statement
Given an unknown building with (smart) devices, can we autonomoumsly locate these devices and the users that walk around inside the building?
Requirements
- No prior configuration or hardware
- Cost-effective, resilliant to changes, easy to deploy
- Protect privacy
- Increase user adoption
- Realtime
- Localisation must be instant
Outline
Robotics: FastSLAM & Particle Filters
Sources of Input: What can we use?
The result: Demo & real world findings
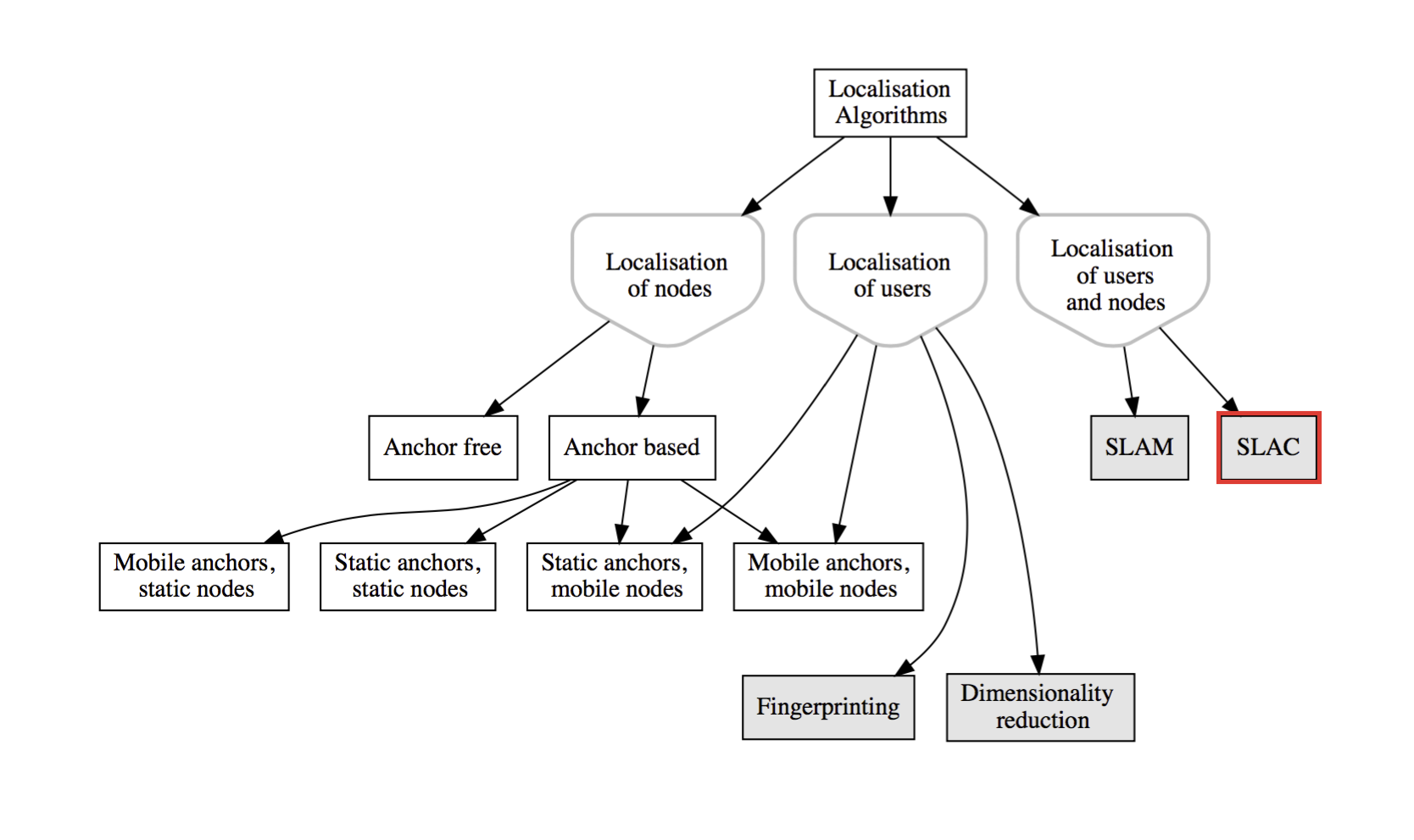
The world of Indoor Localisation
Lets talk about robots..
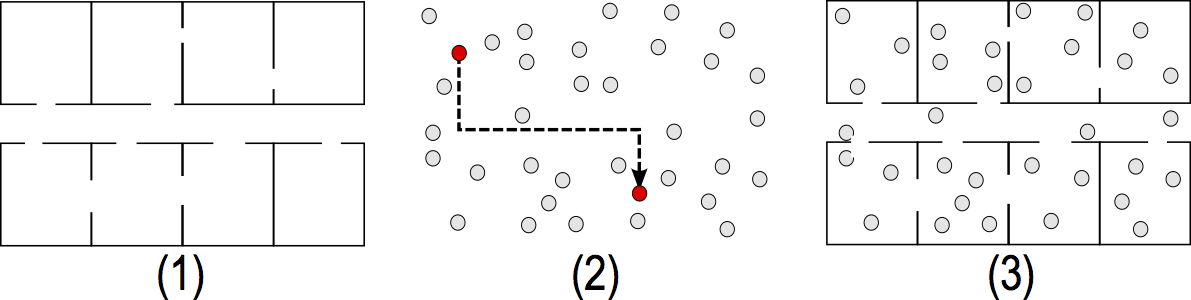
Simulteneous Localisation and Mapping (SLAM)
Given robot's controls and sensor readings what is the current estimated location and map of the environment?
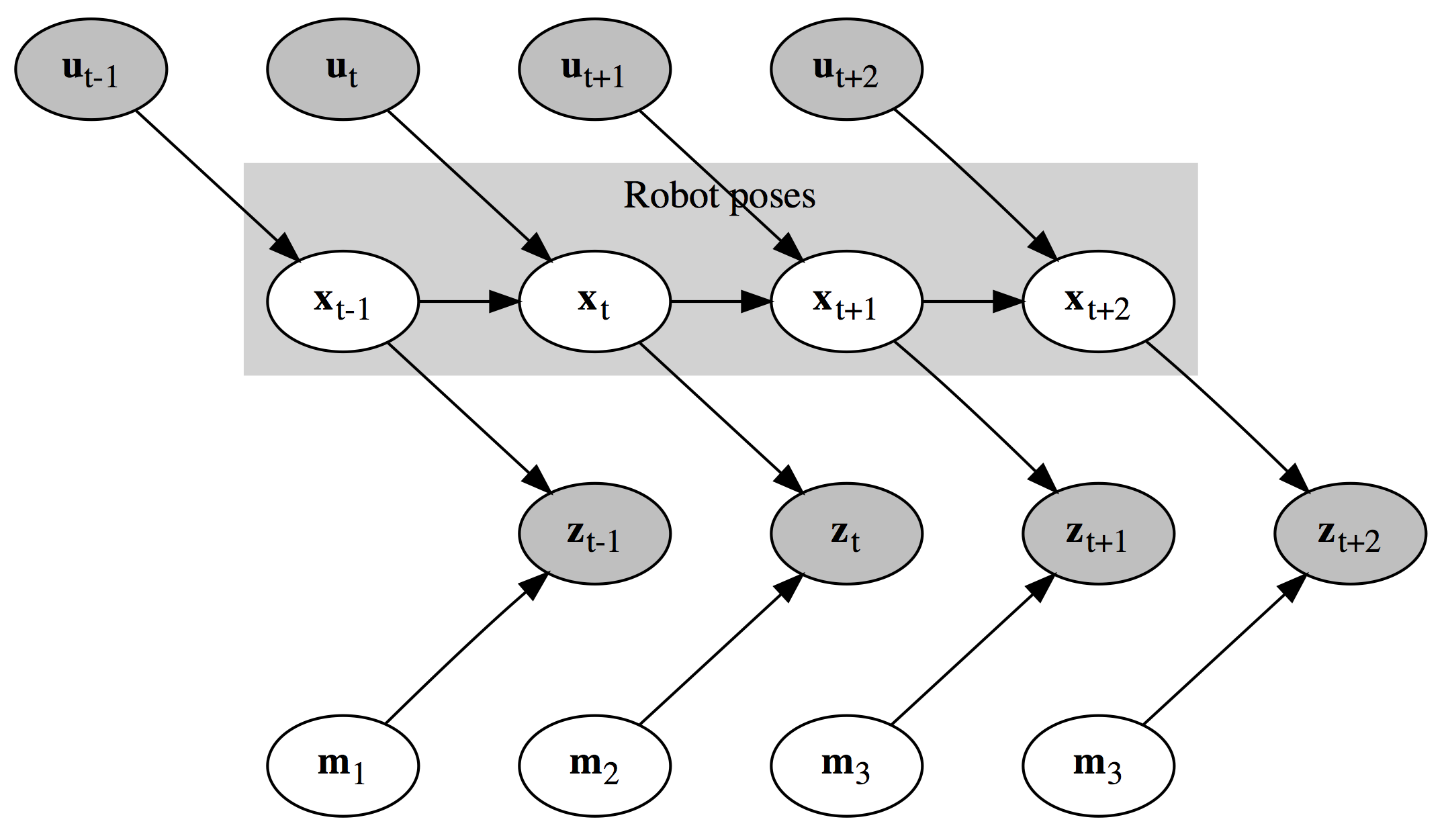
FastSLAM
Online algorithm for solving the SLAM problem
Given observations and the controls, what is the robot's position on the current map?
$$ p(x_{0:t}, m_{1:M} | z_{1:t}, u_{1:t}) $$
Independent landmarks
Uses Rao-Blackwellized particle filter for estimation
Robot's sensor readings → ?
Devices are often connected wirelessly
In our case: Bluetooth Low Energy (BLE)
→ Received Signal Strength Indicator (RSSI)
Measured RSSI
Beacon at fixed distances to the receiver with clear line of sight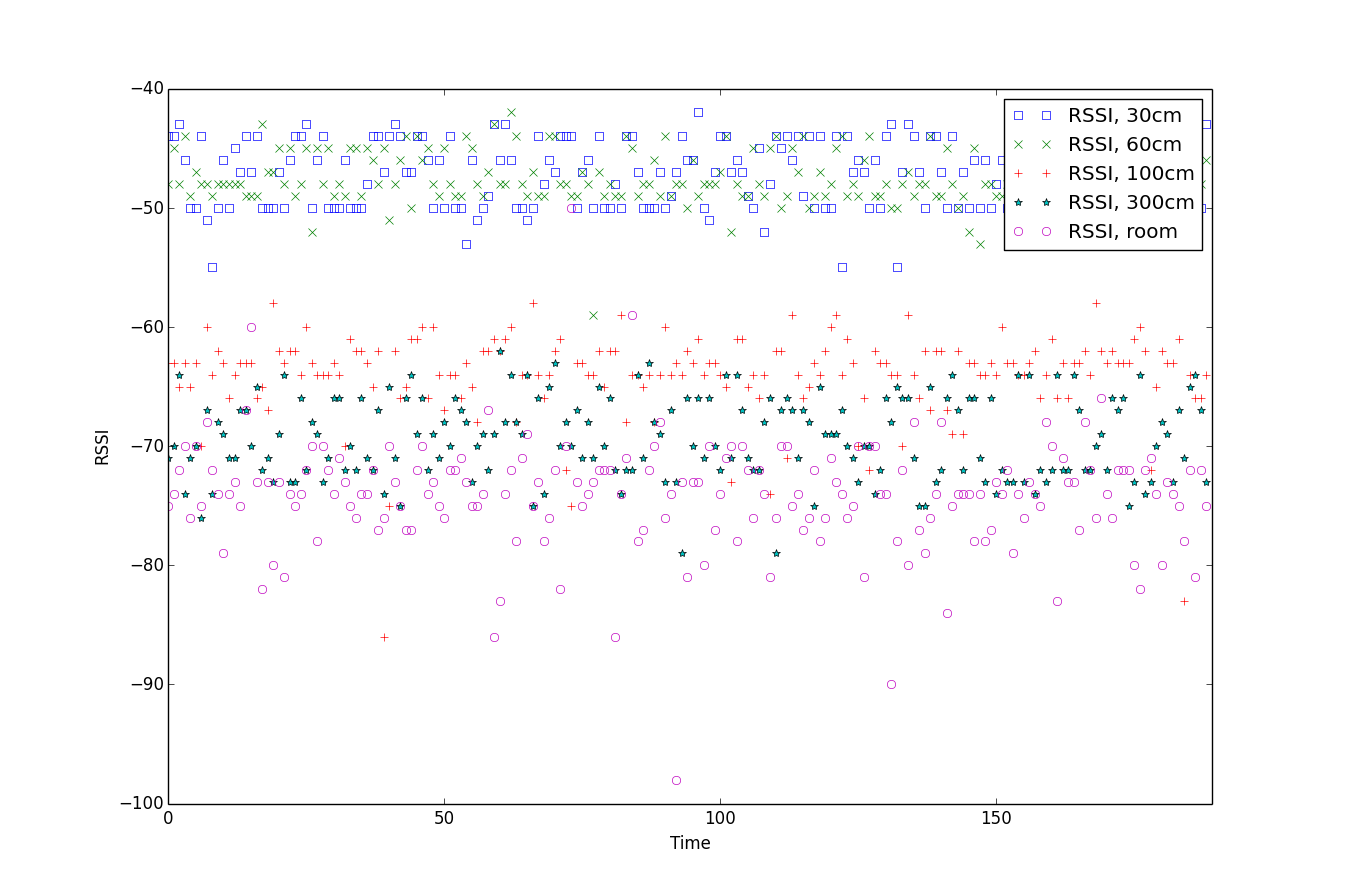
Log-distance path loss model:
$$RSSI = -10n \log_{10}(\frac{d}{d_{0}}) + A$$
- $d$ the distance to the device
- $A$ signal strength at $d_0$
- $n$ an evironment constant
Estimated distance
Beacon at fixed distances to the receiver with clear line of sightIs RSSI usefull?
High levels of noise due to:
- Walls, humans, objects
- Multi-path reflections
- Radio differences
However, available in almost any consumer device
and filtering can help!
Filtered RSSI signal
Using a Kalman filter with static motion model$$\bar\mu_t = A_t \mu_{t-1} + B_t u_t$$ $$\bar\Sigma_t = A_t \Sigma_{t-1} A_t^T + R_t$$
$$K_t = \bar\Sigma_t C_t^T (C_t \bar\Sigma_t C_t^T + Q_t)^{-1}$$
$$\mu_t = \bar\mu_t + K_t(z_t - C_t \bar\mu_t)$$ $$\Sigma_t = (I - K_t C_t) \bar\Sigma_t$$
Robot's control → ?
RSSI gives us distance, but distance needs a where
Users can ground the measurements
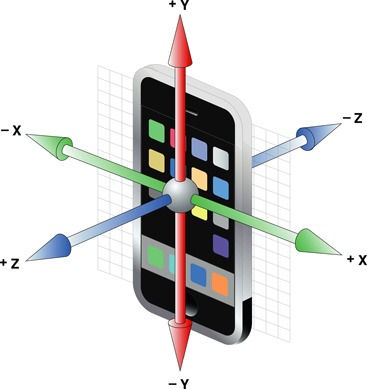
- Accelerometer
- Physical acceleration in $x, y, z$
- Compass
- Heading relative to global north
Simultaneous Localisation and Configuration (SLAC)
Signal strength as observation
Motion measurements as control
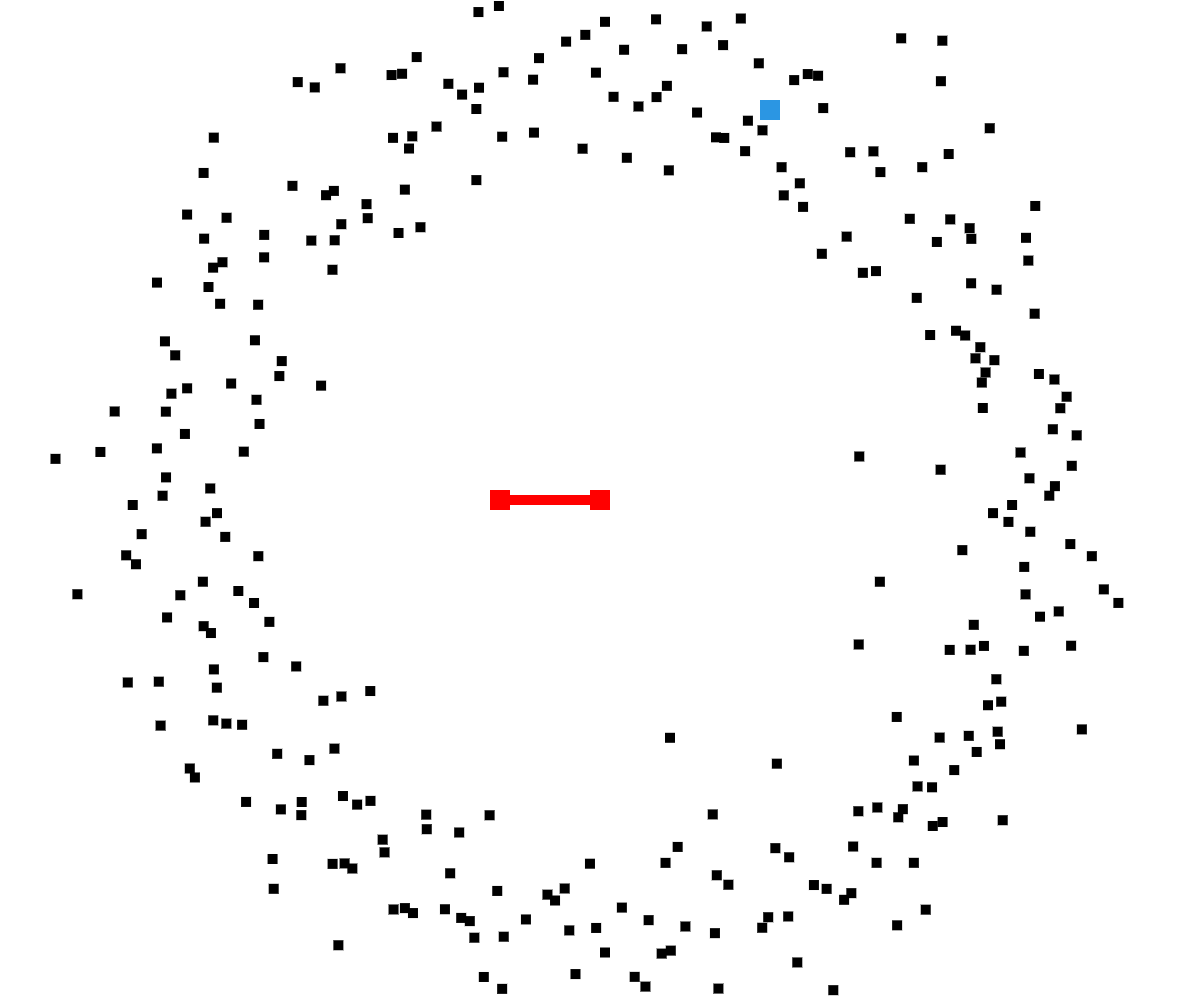
Particle filter at the core
Extended Kalman filters for refinement
$\bar\chi_t = \chi_t = \emptyset$
$\bar\chi_t = \chi_t = \emptyset$
Initialisation, for $m \in M$:
$x_t^{[m]} \sim p(x_t | z_t, x_t^u$)
$\bar\chi_t = \chi_t = \emptyset$
Initialisation, for $m \in M$:
$x_t^{[m]} \sim p(x_t | z_t, x_t^u$)
Sample step, for $m \in M$:
$x_t^{[m]} \sim p(x_t | u_t, x_{t-1}^{[m]}$)
$w_t^{[m]} = p(z_t | x_t^{[m]}) = \frac{1}{\sigma\sqrt{2\pi}} e^{-\frac{(z_t-\mu)^{2}}{2\sigma^{2}}}$
$\bar\chi_t = \chi_t = \emptyset$
Initialisation, for $m \in M$:
$x_t^{[m]} \sim p(x_t | z_t, x_t^u$)
Sample step, for $m \in M$:
$x_t^{[m]} \sim p(x_t | u_t, x_{t-1}^{[m]}$)
$w_t^{[m]} = p(z_t | x_t^{[m]}) = \frac{1}{\sigma\sqrt{2\pi}} e^{-\frac{(z_t-\mu)^{2}}{2\sigma^{2}}}$
Resample step, for $m \in M$:
draw $i$ with probability $\propto w_t^{[m]}$
$\chi_t = \chi_t + x_t^{[m]}$
$\bar\chi_t = \chi_t = \emptyset$
Initialisation, for $m \in M$:
$x_t^{[m]} \sim p(x_t | z_t, x_t^u$)
Sample step, for $m \in M$:
$x_t^{[m]} \sim p(x_t | u_t, x_{t-1}^{[m]}$)
$w_t^{[m]} = p(z_t | x_t^{[m]}) = \frac{1}{\sigma\sqrt{2\pi}} e^{-\frac{(z_t-\mu)^{2}}{2\sigma^{2}}}$
Resample step, for $m \in M$:
draw $i$ with probability $\propto w_t^{[m]}$
$\chi_t = \chi_t + x_t^{[m]}$
$\bar\chi_t = \chi_t = \emptyset$
Initialisation, for $m \in M$:
$x_t^{[m]} \sim p(x_t | z_t, x_t^u$)
Sample step, for $m \in M$:
$x_t^{[m]} \sim p(x_t | u_t, x_{t-1}^{[m]}$)
$w_t^{[m]} = p(z_t | x_t^{[m]}) = \frac{1}{\sigma\sqrt{2\pi}} e^{-\frac{(z_t-\mu)^{2}}{2\sigma^{2}}}$
Resample step, for $m \in M$:
draw $i$ with probability $\propto w_t^{[m]}$
$\chi_t = \chi_t + x_t^{[m]}$
$\bar\chi_t = \chi_t = \emptyset$
Initialisation, for $m \in M$:
$x_t^{[m]} \sim p(x_t | z_t, x_t^u$)
Sample step, for $m \in M$:
$x_t^{[m]} \sim p(x_t | u_t, x_{t-1}^{[m]}$)
$w_t^{[m]} = p(z_t | x_t^{[m]}) = \frac{1}{\sigma\sqrt{2\pi}} e^{-\frac{(z_t-\mu)^{2}}{2\sigma^{2}}}$
Resample step, for $m \in M$:
draw $i$ with probability $\propto w_t^{[m]}$
$\chi_t = \chi_t + x_t^{[m]}$
$\bar\chi_t = \chi_t = \emptyset$
Initialisation, for $m \in M$:
$x_t^{[m]} \sim p(x_t | z_t, x_t^u$)
Sample step, for $m \in M$:
$x_t^{[m]} \sim p(x_t | u_t, x_{t-1}^{[m]}$)
$w_t^{[m]} = p(z_t | x_t^{[m]}) = \frac{1}{\sigma\sqrt{2\pi}} e^{-\frac{(z_t-\mu)^{2}}{2\sigma^{2}}}$
Resample step, for $m \in M$:
draw $i$ with probability $\propto w_t^{[m]}$
$\chi_t = \chi_t + x_t^{[m]}$
Updating the filter
- Sample pose
$$x_{t}^{[m]} \sim p(x_{t} | x_{t-1}^{[m]}, u_{t})$$
- Update EKF's
$$[x_{t+1}^{[m]}, y_{t+1}^{[m]}]^T = [x_{t}^{[m]}, y_{t}^{[m]}]^T + Kv$$
$$\Sigma_{t+1}^{[m]} = \Sigma_{t}^{[m]} - K \sigma_v K^T$$
- Resample
$$w_{t}^{[m]} = w_{t-1}^{[m]} f(z | h_{m}, \sigma_z)$$
Particle representation:
$$Y_{t}^{[m]} =\Big\langle x_{t}^{[m]}, \langle\mu_{1,t}^{[m]}, \Sigma_{1,t}^{[m]}\rangle, \ldots, \langle\mu_{N,t}^{[m]}, \Sigma_{N,t}^{[m]} \rangle\Big\rangle$$
EKF Update
$$[x_{t+1}^{[m]}, y_{t+1}^{[m]}]^T = [x_{t}^{[m]}, y_{t}^{[m]}]^T + Kv$$
$$\Sigma_{t+1}^{[m]} = \Sigma_{t}^{[m]} - K \sigma_v K^T$$
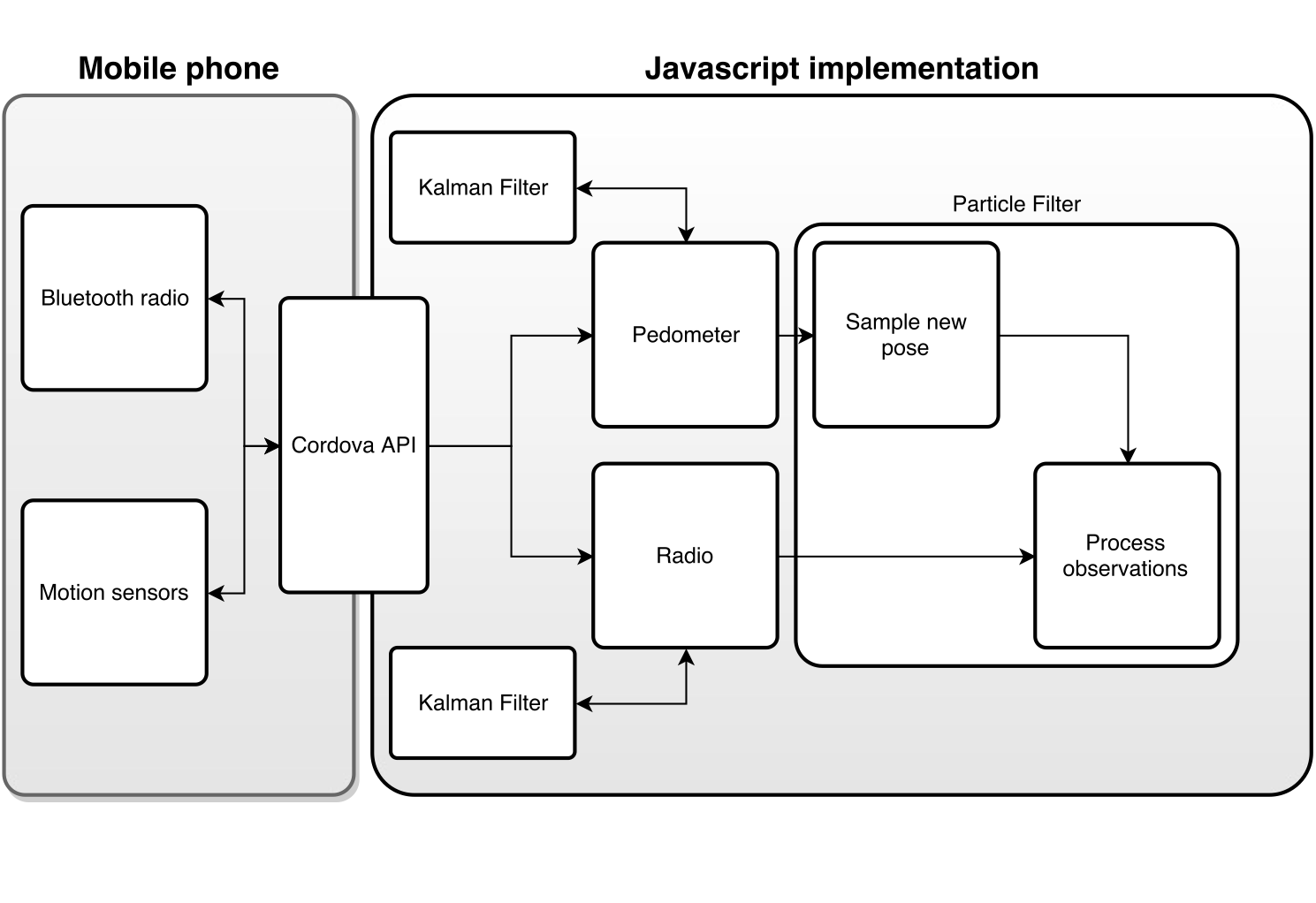
Implementation details
Fully written in Javascript
(including pedometer, SLAM algorithm, particle filters and visualisations)
ECMAScript 6/2015
(with BabelJS as transpiler)
Built for Android & iOS
(Using Cordova)
Bluetooth devices from DoBots
(iBeacon compatible, BLE)
Code on GitHub
(See: github.com/wouterbulten/slacjs)

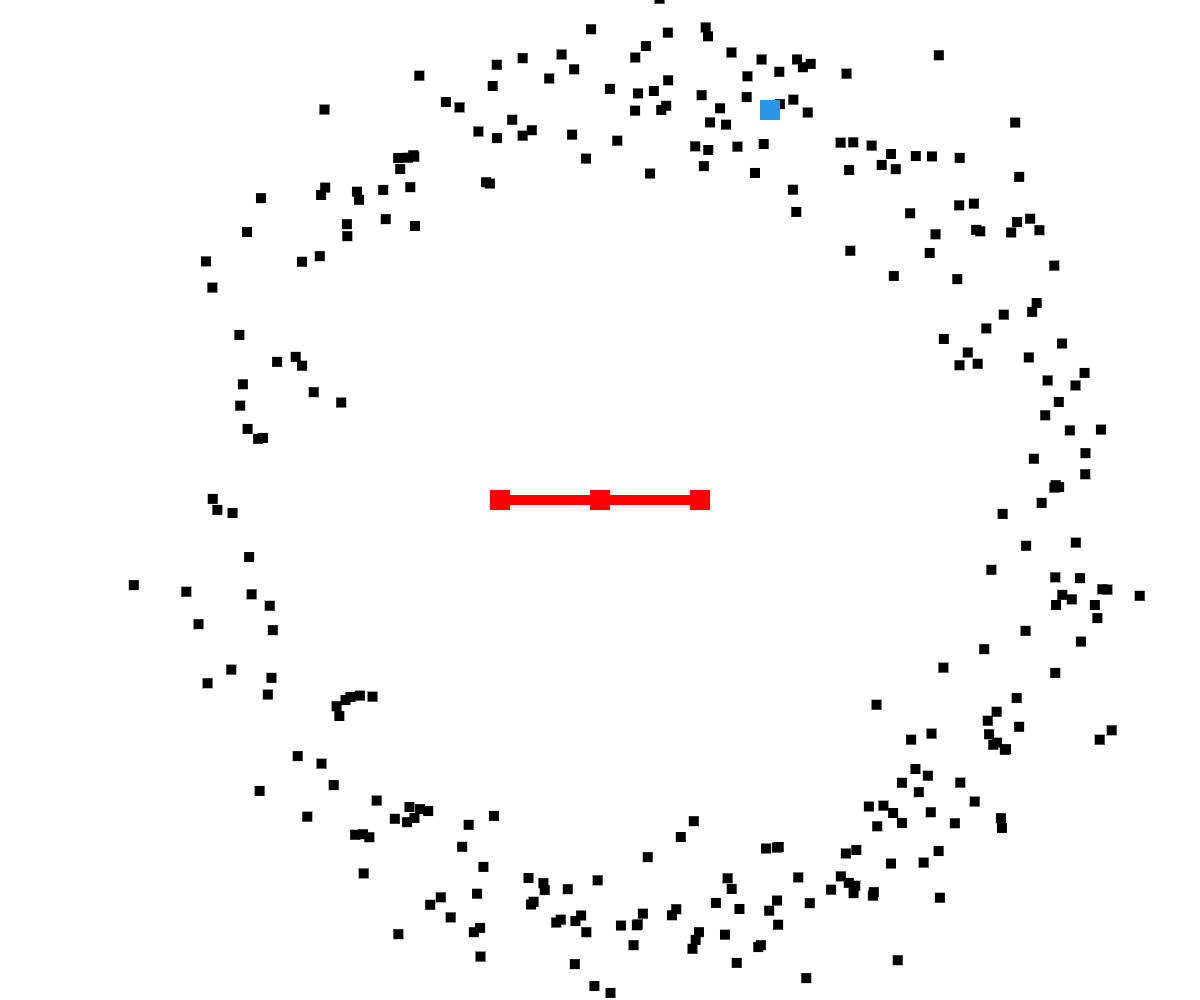
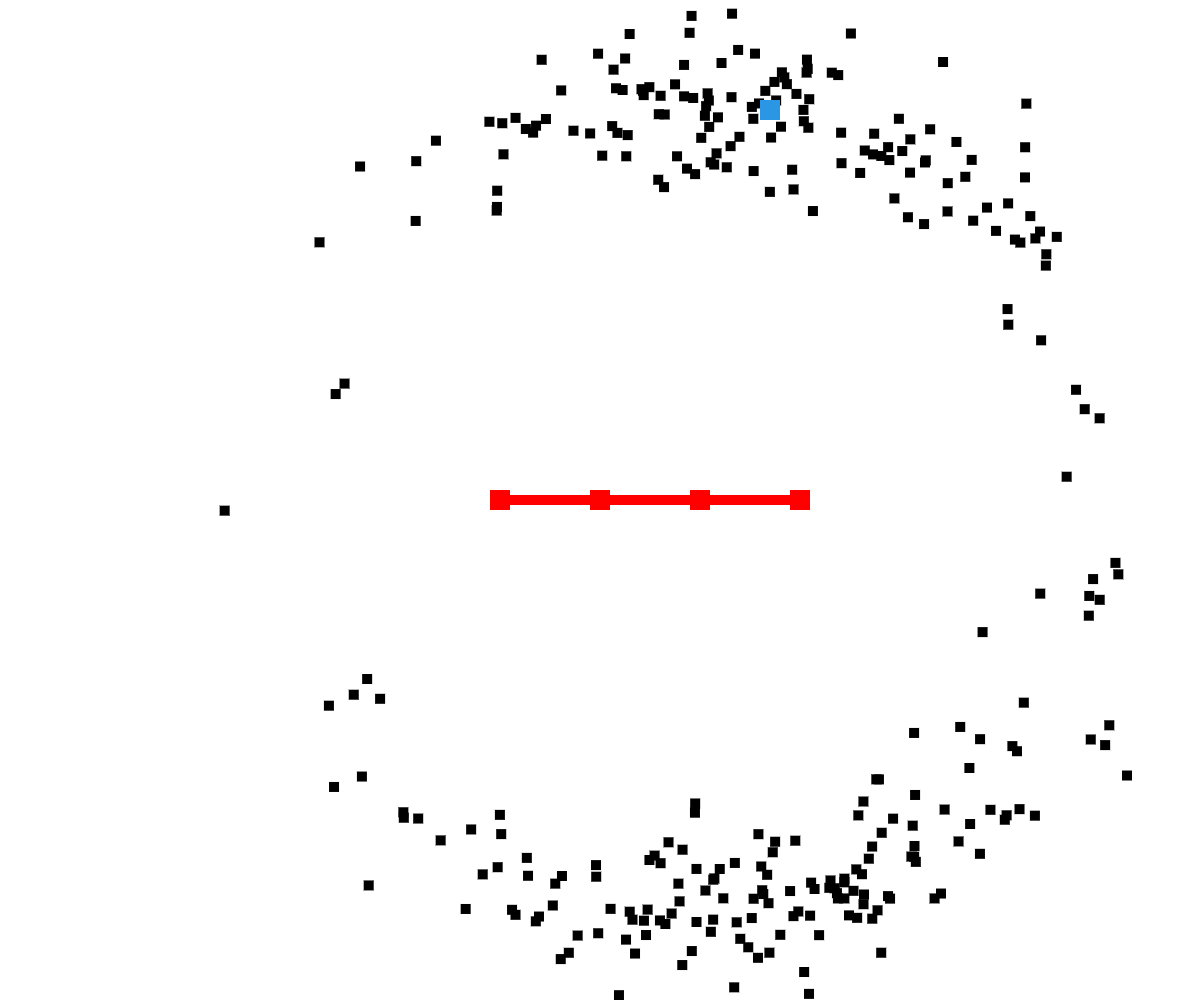
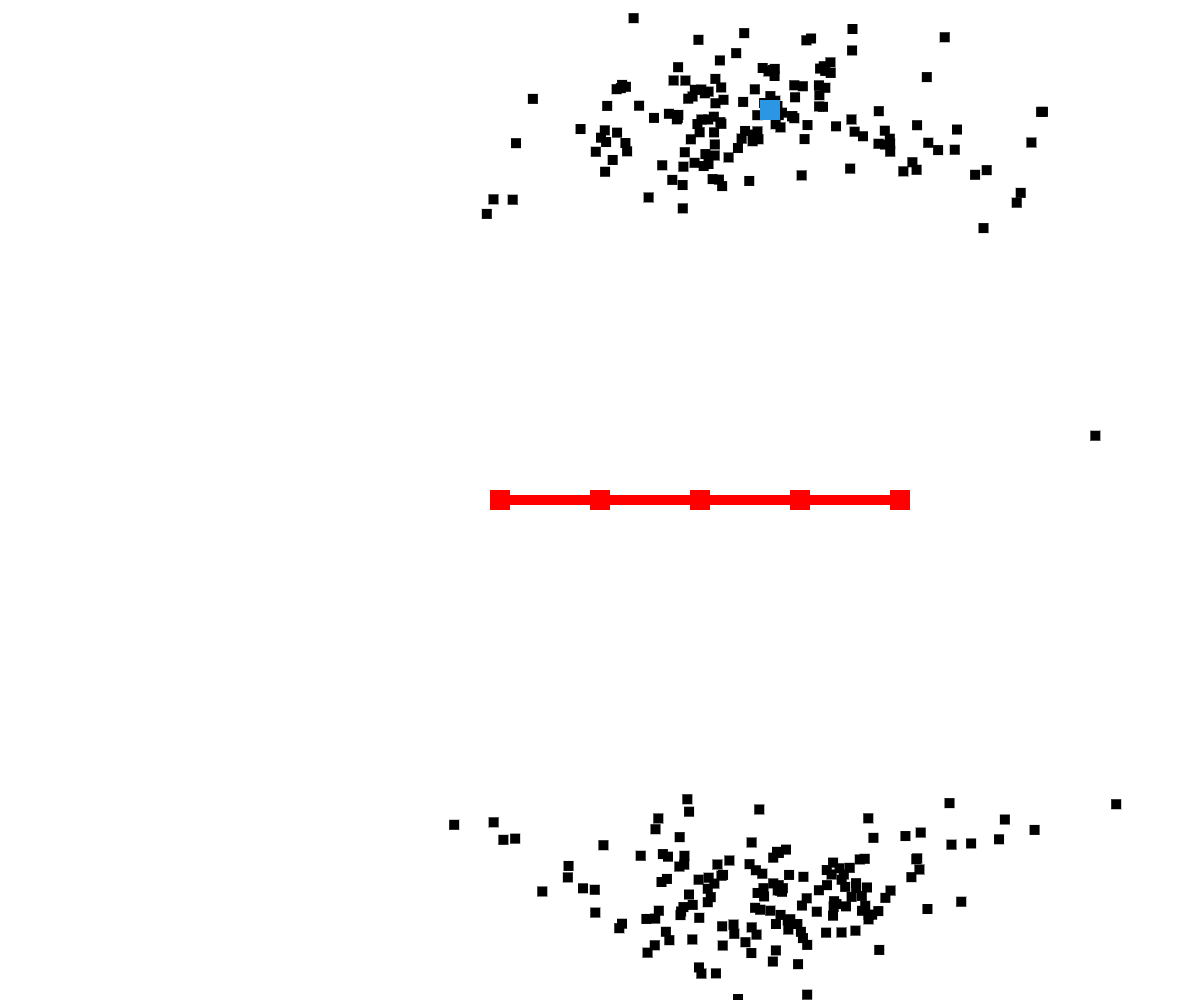
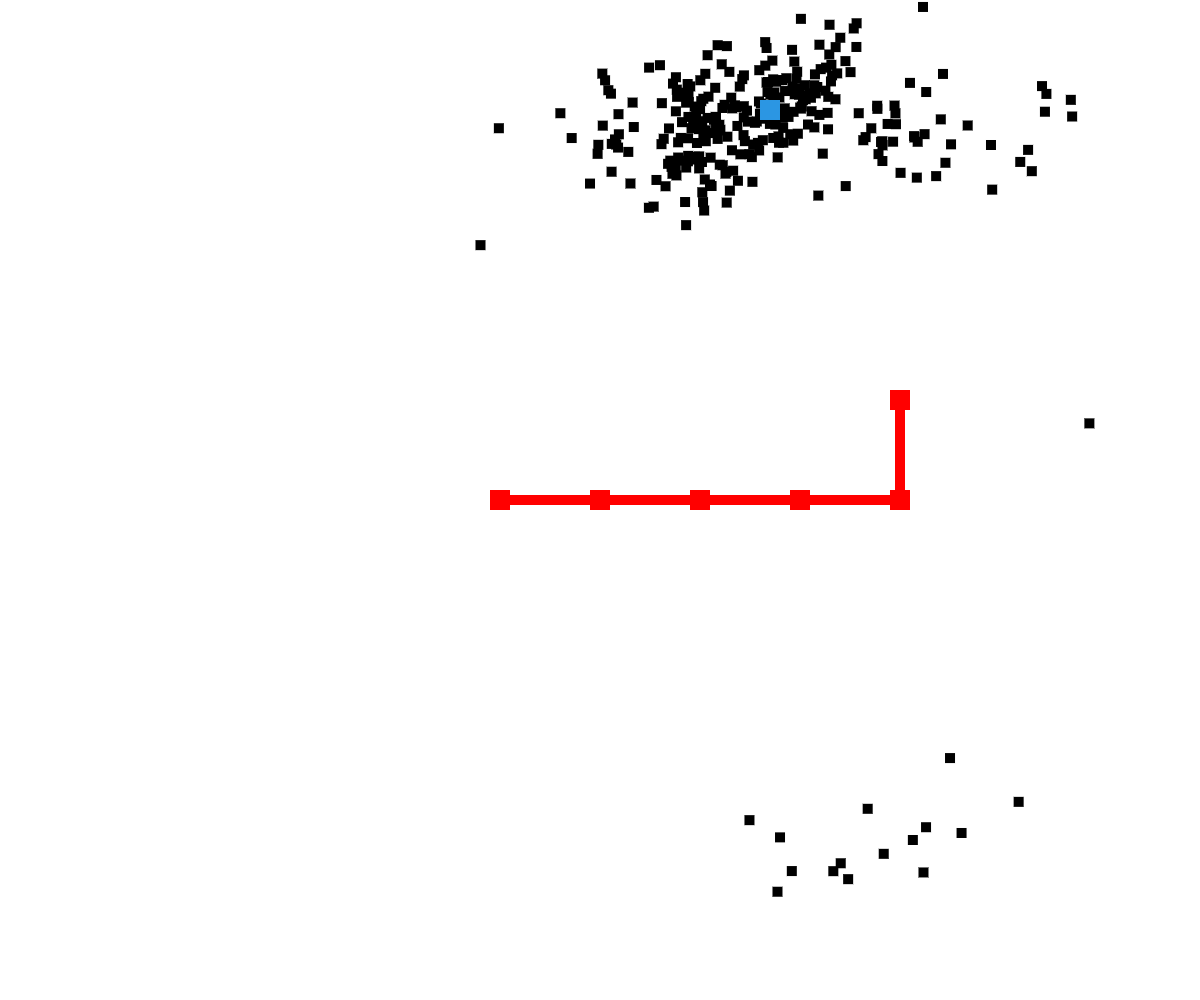
Demo
Average error: ∞ m
Simulations
Perfect world performance
Effect of number of RSSI measurements
Effect of device location
Live tests
Fixed route, average 60 steps / 2 min walking
Effect of environment noise
Effect of RSSI measurements
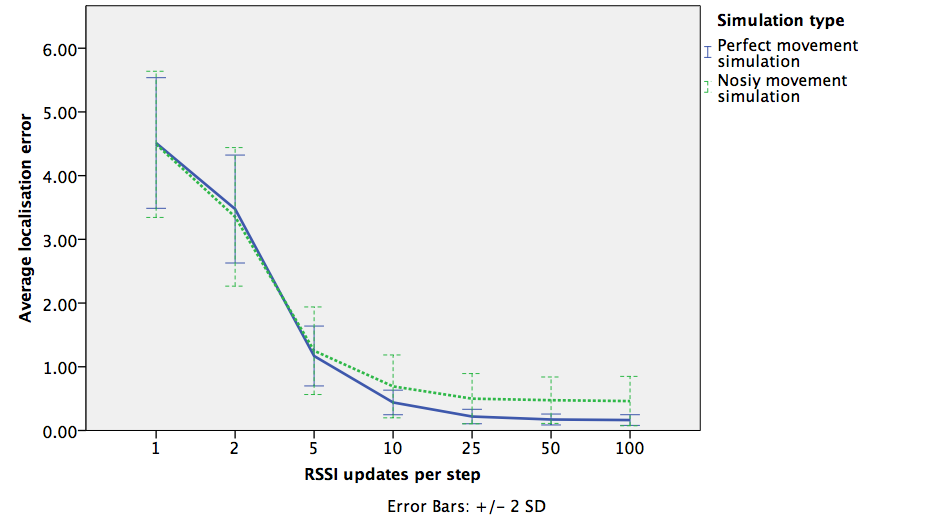 Curve estimation model. Significant regression equation.
Curve estimation model. Significant regression equation.$$(F (1, 3498) = 33868.750, p < .000), R^2 = .906$$
Effect of device location
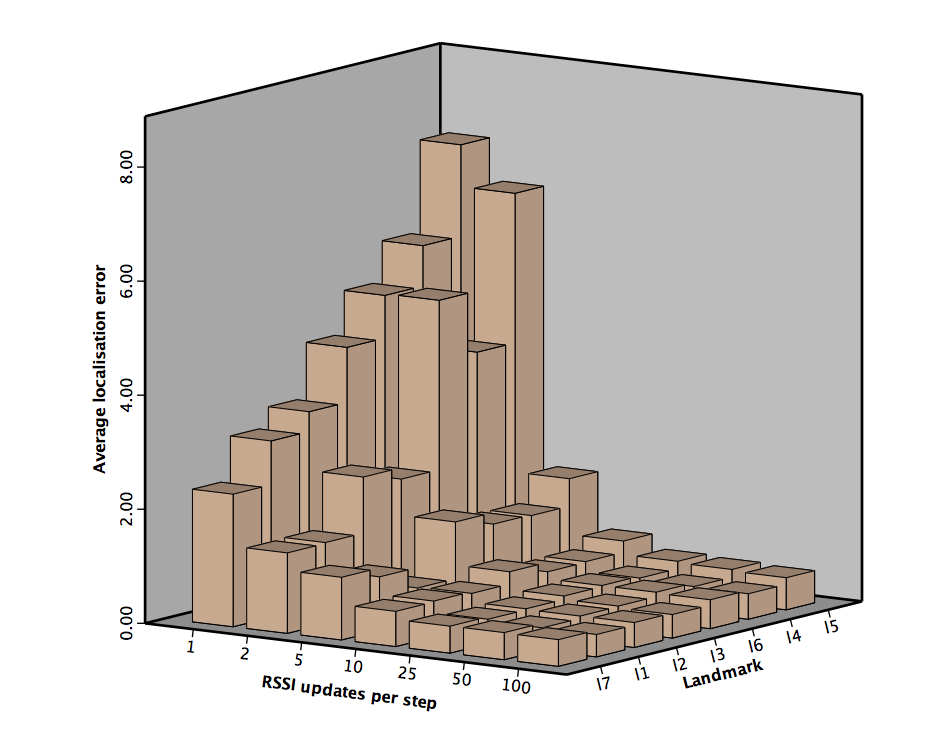 Repeated-measure-ANOVA for each condition. Significant effect for each condition (p = .000).
Repeated-measure-ANOVA for each condition. Significant effect for each condition (p = .000).$$eta^2 = [.503, .698, .284, .063, .052, .065, .065]$$
Simulations
Error in meters per landmark, 100 runs per data setSimulation experiments
Noisy movement: 0.56 m (sd 0.20 m)
Perfect world: 0.26 m (sd 0.07 m)
Evaluation method
Online recordings (RSSI & motion)
Offline evaluation, 500 per trace
Measured average localisation error for DoBeacons
97% of runs resulted in estimate for each device
Live tests


Localisation error live tests
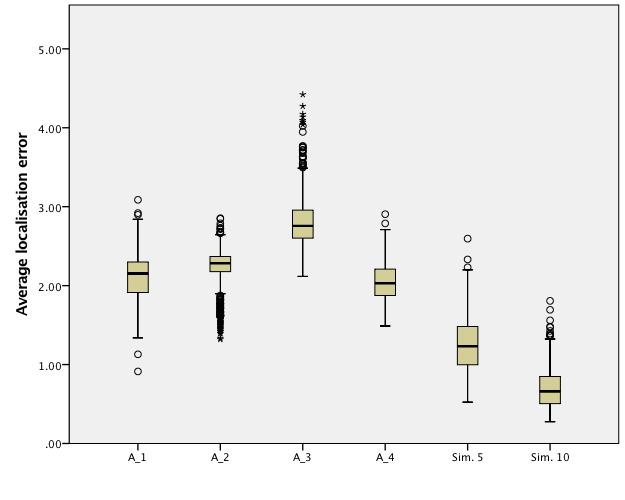
Accuraccy of 2.3m, 60 steps ~ 2min walking
Difference in performance between simulation and real world
Walls, obstacles, users themselves
Mirroring errors
→ Invest in better motion & distance predictions
→ Predict the environment
→ Longer traces
→ Map fusing
Future work: Map fusing
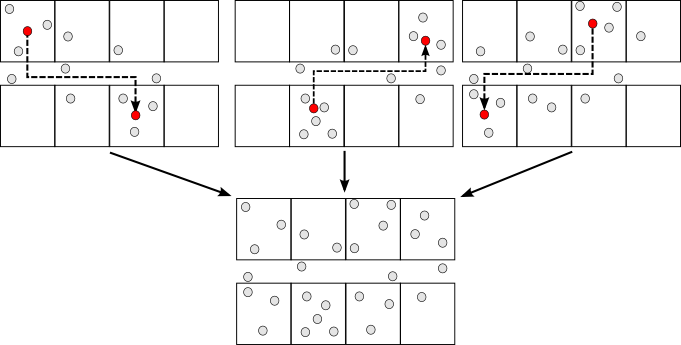
(With respect for user privacy)
“Human SLAM”
Using an adapted range-only version of SLAM, we replaced the robot with a human and used that to locate both humans and devices inside buildings.